



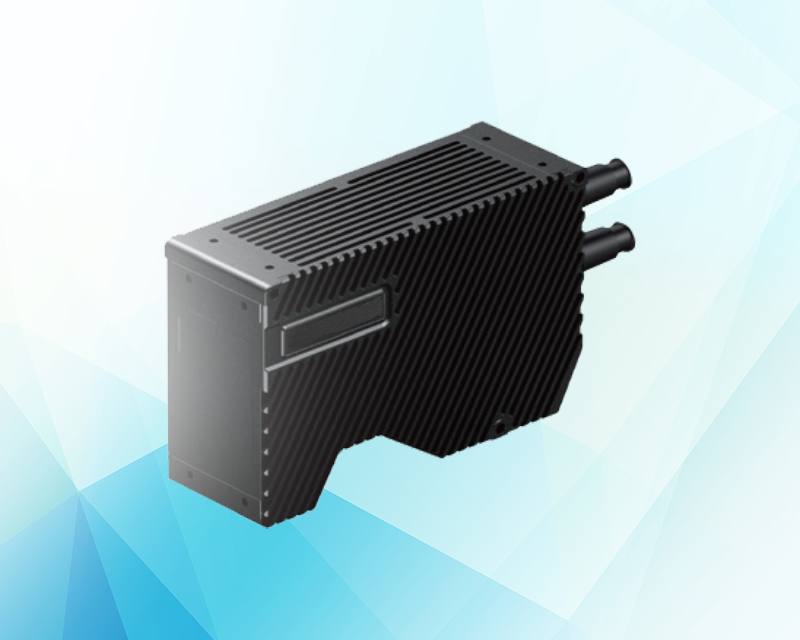
激光3D轮廓相机-57系列
 面阵扫描 高精度尺寸测量 内置处理算法
面阵扫描 高精度尺寸测量 内置处理算法
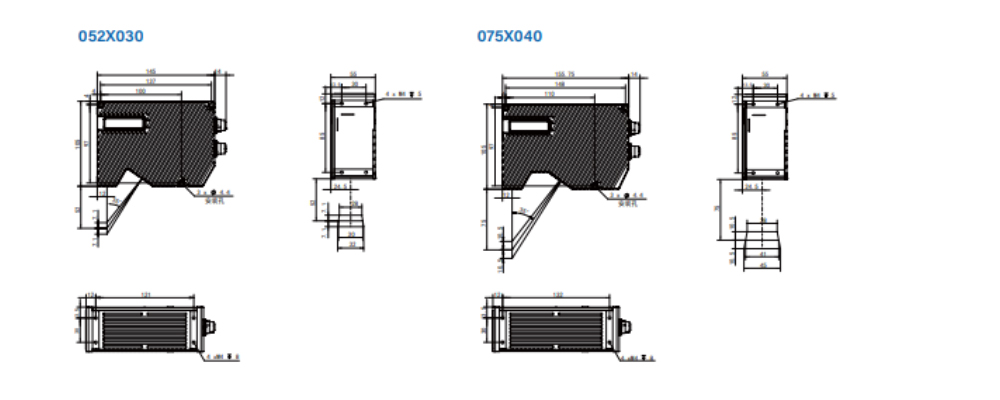
激光3D轮廓相机尺寸图:
| 型号 | 052X030 | 075X040 | 120X060 | 120X085 | 200X130 | 420X265 | ||
| 安装距离(mm) | 52 | 75 | 120 | 120 | 200 | 420 | ||
| 测量范围 | Z轴(高度)(mm) | ±7.1 | ±10.5 | ±17 | ±26.5 | ±47.5 | ±110.5 | |
| (F.S.=14.2) | (F.S.=21) | (F.S.=34) | (F.S.=53) | (F.S.=95) | (F.S.=221) | |||
| X轴(宽度) (mm) | 近端 | 28 | 38 | 54 | 72 | 111 | 206 | |
| 参考位 | 30 | 41 | 59 | 85 | 133 | 265 | ||
| 远端 | 32 | 45 | 64 | 97 | 155 | 324 | ||
| 重复精度 | Z轴(高度)(um) | 0.6 | 0.8 | 1.3 | 2 | 4 | 8 | |
| 数据间隔 | X轴(宽度)(um) | 10 | 14 | 20 | 30 | 48 | 100 | |
| 线性 | Z轴(高度) | ±0.035% F.S. | ||||||
| 轮廓数据点数 | 3240点 | |||||||
| 采样频率 | 全视野扫描帧率 | 1250 帧/s | ||||||
| ROI帧率 | 最高 24000 帧/s | |||||||
| 光源 | 类型 | 蓝色半导体激光 | 红色半导体激光 | |||||
| 波长 | 405 nm(蓝紫光) | 638 nm(红光) | ||||||
| 激光分类 | 3R类激光产品 | |||||||
| 温度特征 | 0.01% F.S./℃ | |||||||
| 数据接口 | GigE千兆以太网 | |||||||
| 输入电压 | 24 V ± 10%,最大消耗电流1.2A | |||||||
| 环境耐性 | 外壳防护级 | IP67 | ||||||
| 环境温度 | 0至+50°C | |||||||
| 环境湿度 | 20至85%(无冷凝) | |||||||
| 振动 | 10 - 57 Hz 双振幅1.5mm,X、Y、Z方向各2小时 | |||||||
| 抗冲击 | 15g半正弦冲击,周期 6ms,从X、Y、Z三个方向的正负方向冲击 | |||||||
| 材料 | 铝合金 | |||||||
| 尺寸(mm) | 145x105x55 | 156x105x55 | 175x105x55 | 165x105x55 | 185x105x55 | 250x105x55 | ||
| 重量(g) | 940 | 980 | 1040 | 1000 | 1090 | 1400 | ||
| 注: *1 在标准距离静态状态下,取4096次平均值为该值。 *2 可更改数据间隔。更改后,轮廓数据点数也变动。 *3 在标准测试环境下,经过64次X轴和8次Y轴的平滑滤波,测试铝合金标准块的数据。 *4 在标准测试环境下,测试铝合金标准块的数据。 | ||||||||
-
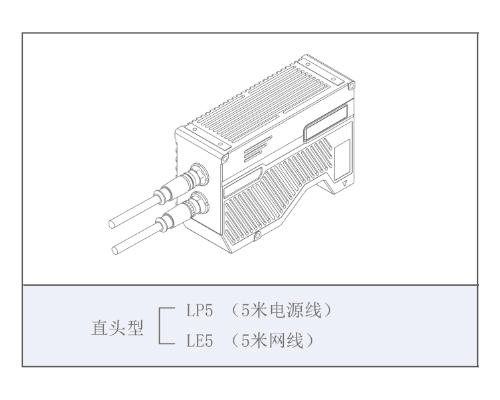
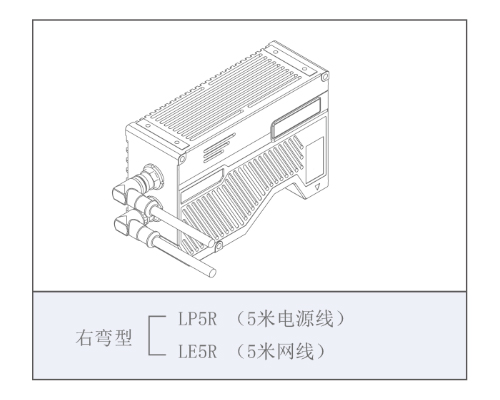
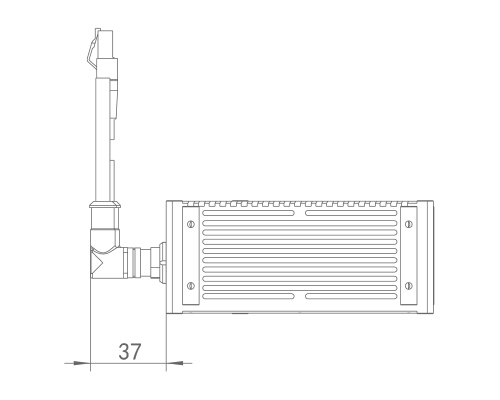
线缆尺寸
-

线缆尺寸
-
线缆尺寸
-

线缆型号
-
线缆型号

-
手机壳段差检测
-
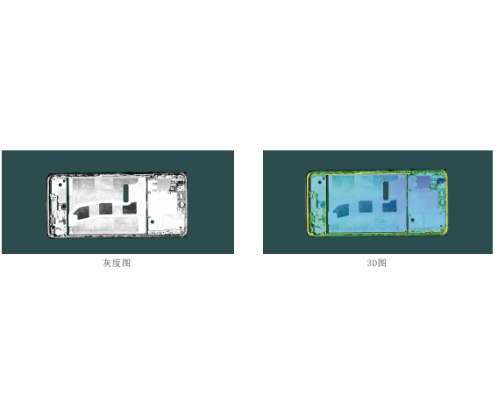
手机中框平面度检测
-
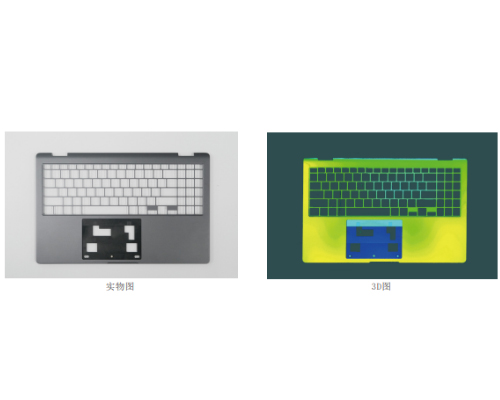
笔记本外壳平面度检测
-
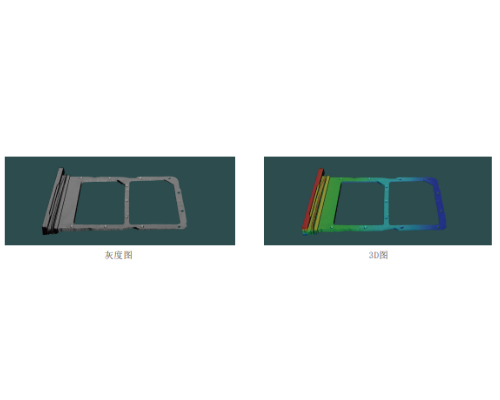
卡托尺寸测量
-
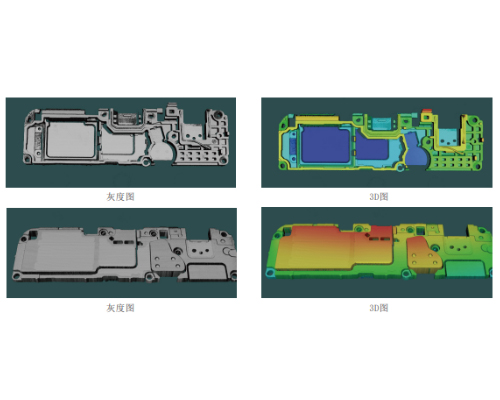
扬声器BOX检测
-
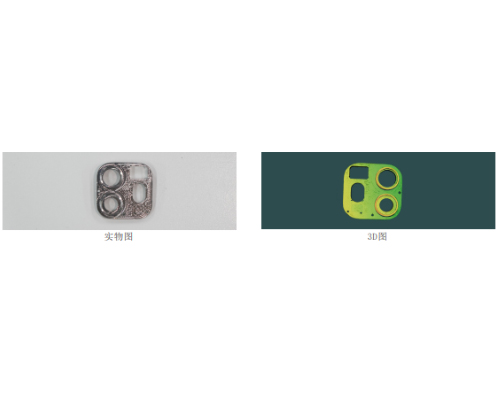
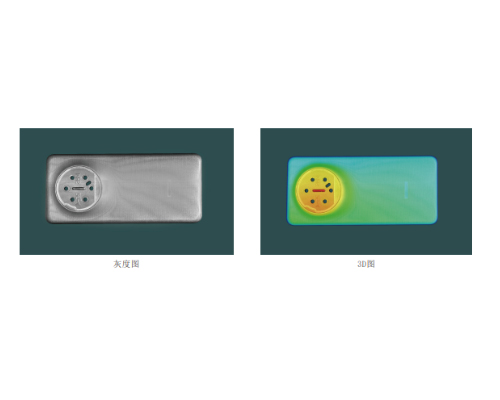
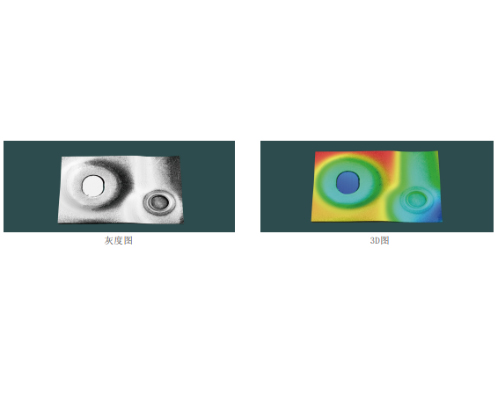
摄像头模组高度差检测
-

电芯顶盖平面度检测
-
汽车铆钉焊接检测